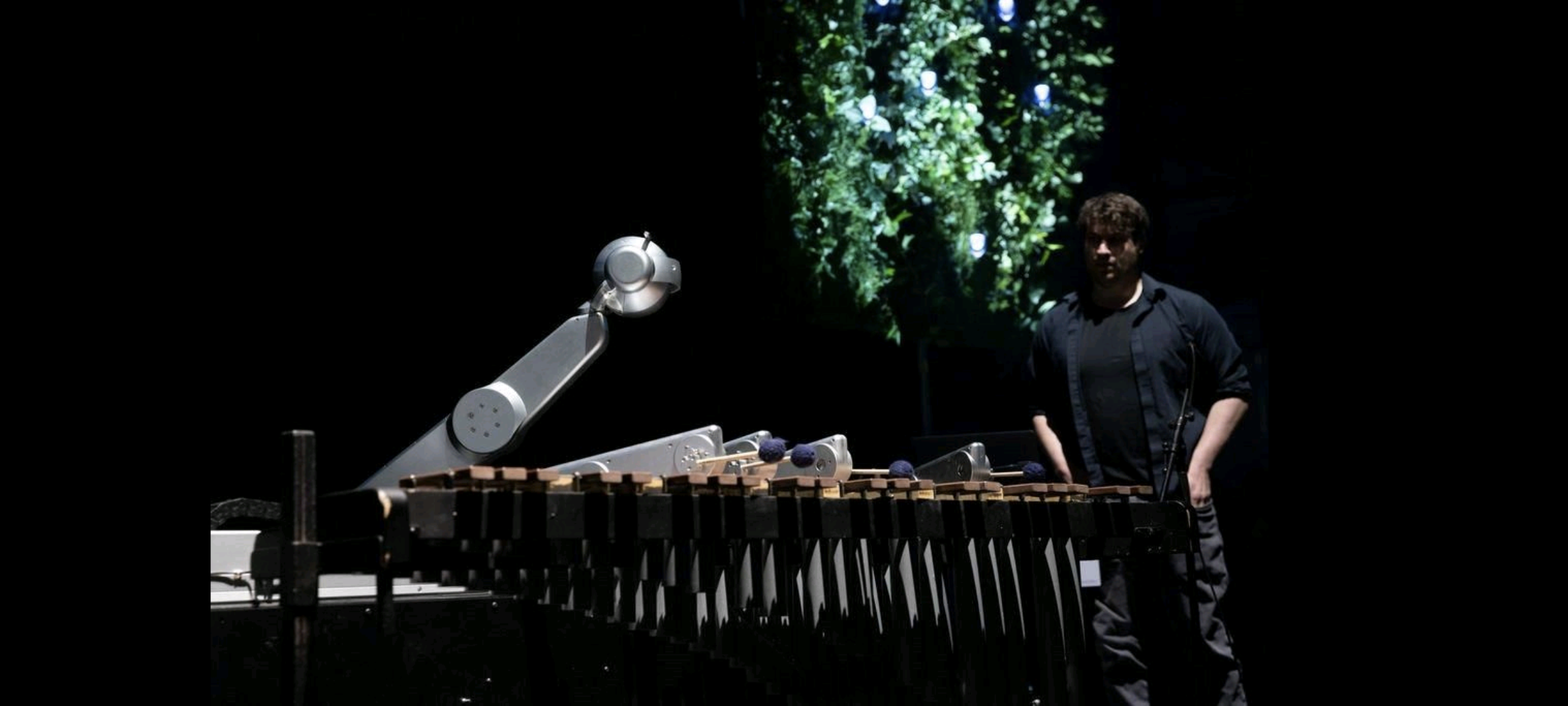
Shimon is a robotic marimba player that has been developed over many years. After learning about expressive and fluid dancing from my thesis, I used some of this work to creatae new fluid and animate dances for shimon.
Shimon signaling that its time for me to play
The new dances encorperate follow through and follow similar rules to my masters thesis with dancing robot arms. Working with Raghavasimhan Sankaranarayanan and Xuedan Gao, we created a framework for robotic musicians to improve synchronization, and cue different timings.
Relevant Publications
Music, body, and machine: gesture-based synchronization in human-robot musical interaction
Xuedan Gao, Amit Rogel, Raghavasimhan Sankaranarayanan, Brody Dowling, Gil Weinberg
Frontiers in Robotics and AI